- TOPページ>
- 畑村耕一のエンジン哲学
畑村耕一のエンジン哲学
代表畑村の「私のエンジン哲学」
■私のエンジン哲学「エンジンはない方がええ!」
 グライダーの操縦席にて
グライダーの操縦席にて
筆者はグライダーパイロットで、学生時代から50年、自然の力を利用して飛ぶエンジンのない飛行を楽しんでいる。オーストラリアに行って5時間、300km以上をエンジンなしで飛んだこともある。エンジン付きのモーターグライダーでも飛んだが、エンジンをかけて離陸して上空でエンジンを止めるとほっとする。聞こえるのは風の音だけ。読者は想像しにくいと思うが、車のアイドルストップの感触をずっと大きくした感じなのだ。ここから「エンジンはないほうがいい」と思うようになった。エンジンは振動騒音を発生、燃料を消費、排気ガスを出す、重くスペースを取る・・・。車が走ることができれば、エンジンはないほうがいいのだ。
■環境問題への関心から目指したエンジン開発
ロボット工学を専攻していた学生グライダーパイロットは、1975年に東洋工業(現マツダ)に入社して新交通システムというエンジンのない自動運転の車の開発プロジェクトを担当することになる。そこで出会ったのが、荷台の下に鉛バッテリーをぎっしり積み込んだ、その頃の最新技術の軽トラックの電気自動車EVだ。当時、車はメカミッションが当たり前だった時代、筆者はEVの快適な走りに魅了されてしまった。絶対的な走りは貧弱なものの、アクセルを踏んだ時の素直な応答性、エンジン騒音のない静かな走り、変速不要で途切れのないスムーズな加速、、、、理想のクルマの走りをそこに見出した。だが、当時の電池性能では実用化には程遠かった。オイルショックのあおりを受けて新交通システムのプロジェクトは3年で解散となり、筆者はエンジン設計に移動させられた。

ディーゼルエンジンに移った筆者は「エンジンはないほうがいい」(自動車エンジン技術がわかる本/ナツメ社、2008)を確信していたが、エンジンをなくすわけにも行かず、とにかくエンジンを小さくしようと過給エンジンにのめり込んで40年もエンジン研究開発に取り組む結果となったわけである。
■エンジンで走っていても、やっぱり「エンジンはない方がええ」
 マツダ ミラーサイクルエンジン
マツダ ミラーサイクルエンジン
私のエンジン哲学に基づいて1993年には世界初の過給ダウンサイジングガソリンエンジンのミラーサイクルエンジンを実用化した。その後「過給ダウンサイジング」を提唱し続けてきてやっと日本メーカも過給ダウンサイジングが定着してきたが、排ガス計測モードの変更に伴ってダウンサイジングの行き過ぎを元に戻すライトサイジング/アップサイジングの方向に動き始めた。それとは別に各国の自動車産業保護政策と絡んで、電気自動車フィーバーが起こりエンジンはなくなるのではないかという風潮が生まれているので、筆者は「エンジンはなくならない」(図解自動車エンジン技術/ナツメ社、2016)という主張を始めた。最近筆者が重要だと思うのは、具体的な手段は別として、「エンジンはなくならない」が「エンジンはないほうがいい」というエンジン哲学だ。この意味を以下に説明していく。
■クルマの走りの理想と電動モーター駆動
ここではクルマの「走り」について、思い込みを捨て原点に戻って考えてみたい。 クルマの駆動力は速度ゼロから大きな駆動力を発生して、高速までその駆動力を維持するのが理想である。タイヤの駆動トルクは回転機械(エンジン/モーター)のトルクに減速比をかけた値になるが、タイヤの摩擦力が十分高いとすれば、回転機械内部や減速機構の機械的強度で最大駆動力は制限される。回転機械のエネルギー源(燃料/電力)にエネルギー効率をかけたものが出力として取り出せるが、残りのエネルギーは熱となって放出される。この熱によって回転機械の温度が上昇して温度限界(例えばエンジンの排気温度/モーターの巻線温度)に達すると、回転機械の出力限界になる。低速から最大駆動力を維持して、速度が増加すると駆動出力(=駆動力×速度)が増加してこの限界に達した点が最大出力となって、それ以上の速度ではトルクが低下する一定出力の駆動力カーブになる。
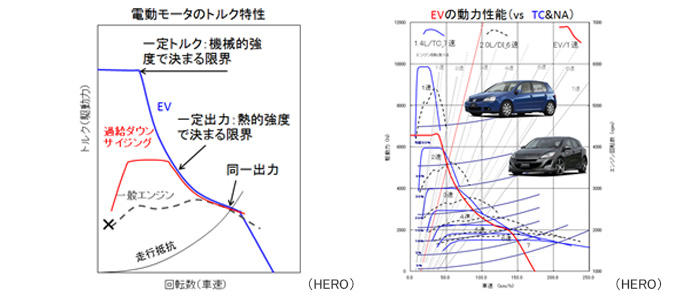
電動モーター駆動はこのような理想のトルク特性を持つが、エンジンの場合、回転数ゼロでは運転不能で、1000rpmを過ぎてやっと小さいトルクが出て、中速回転で最大トルクになり、高回転で低下していく。そのため、トランスミッションを使って理想の駆動力カーブに無理やり近づけようとしているが、ATでは変速が必要なので、シフトショックとエンジン回転数が段付きで変化することによる応答遅れが避けられない。CVTの場合は無段変速だが、エンジン回転数変化に伴う応答遅れ、よく言うラバーバンドフィールが避けられない。
一方、最近マツダが主張し始めている「躍度(加加速度)」という言葉がある。マツダの造語でなく辞書にも載っているれっきとした日本語で、英語で「ジャーク」と呼び、乗り物の乗り心地を評価する際によく使われる単語だ。
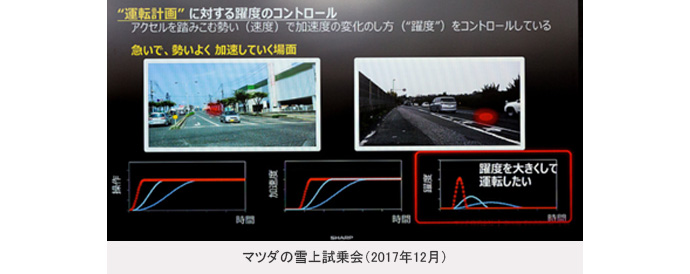
従来エンジン車でもアクセル開度に応じて期待する加速度が得られるようになっているが、狙いのジャークを実現するのは難しいというより不可能だ。4サイクルエンジンが応答するには2回転(1サイクル)の無駄時間が必要になるのに加えて、大きな加速度が必要な場合はトランスミッションで変速してエンジン回転数を増加するまで期待の駆動力は発生しない。結果、アクセルを踏み込んでからのタイムラグが避けられない。ドライバーはそれに慣れているので不具合と感じないだけで、実際はアクセルの踏み込み速度とジャークには大きな乖離が発生している。乖離のない理想の走りを実現するには、トルクを瞬時に狙い通りに制御できる電動モーター駆動しか考えられない。
■我々が目指すエンジンの最終形とは
これから次々と出てくる魅力的な走りのEVに多くの人が乗る機会が増えてくると、電動モーター駆動でないと走りの快適性に満足できないユーザーが増えてくるに違いない。また、自動運転が普及してAIがアクセルコントロールするようになっても、快適性と安全性の面で電動モーター駆動の優位性は変わらない。エンジンで直接タイヤを駆動する車は20世紀の遺物と呼ばれる日が来るかもしれない。